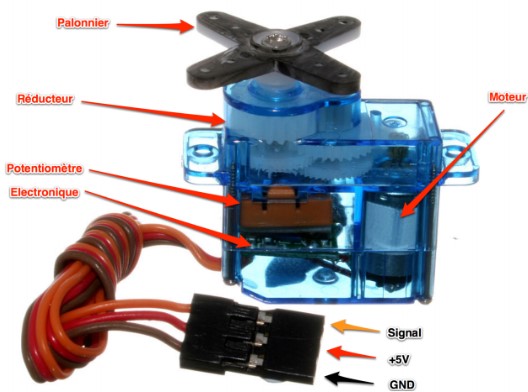
servomoteur
Code pour la commande d’un servomoteur
#include //Inclusion de la bibliothèque Servo
Servo myservo; // Création d'un objet Servo
int pos = 0; //Angle du servomoteur
void setup() {
myservo.attach(11); //Choix de la broche du servo moteur
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { //Parcours la plage angulaire [0-180] degré par degré
myservo.write(pos); //Actualise la position
delay(15); //Attend 15 ms avant l'actualisation
}//Fin for
for (pos = 180; pos >= 0; pos -= 1) { //Parcours la plage angulaire [0-180] degré par degré
myservo.write(pos); //Actualise la position
delay(15); //Attend 15 ms avant l'actualisation
}//Fin for
}//Fin loop